Joystick - IOC support (not really a client)¶
The joystick is an operator interface. Controls for this interface have been implemented here within the IOC.
Keenan Lang, APS BCDA group, had developed an HMI (human-machine interface) module to allow human-machine interface devices such as mice, keyboards, and joysticks (and other) to communicate directly into an EPICS IOC. In a few hours, he added that support to the robot IOC project so that a particular joystick can be used to control the robot arm directly within the IOC.
With added joystick control in the IOC, it is not necessary to require a KVM GUI (video screen + keyboard + mouse) to operate the robot.
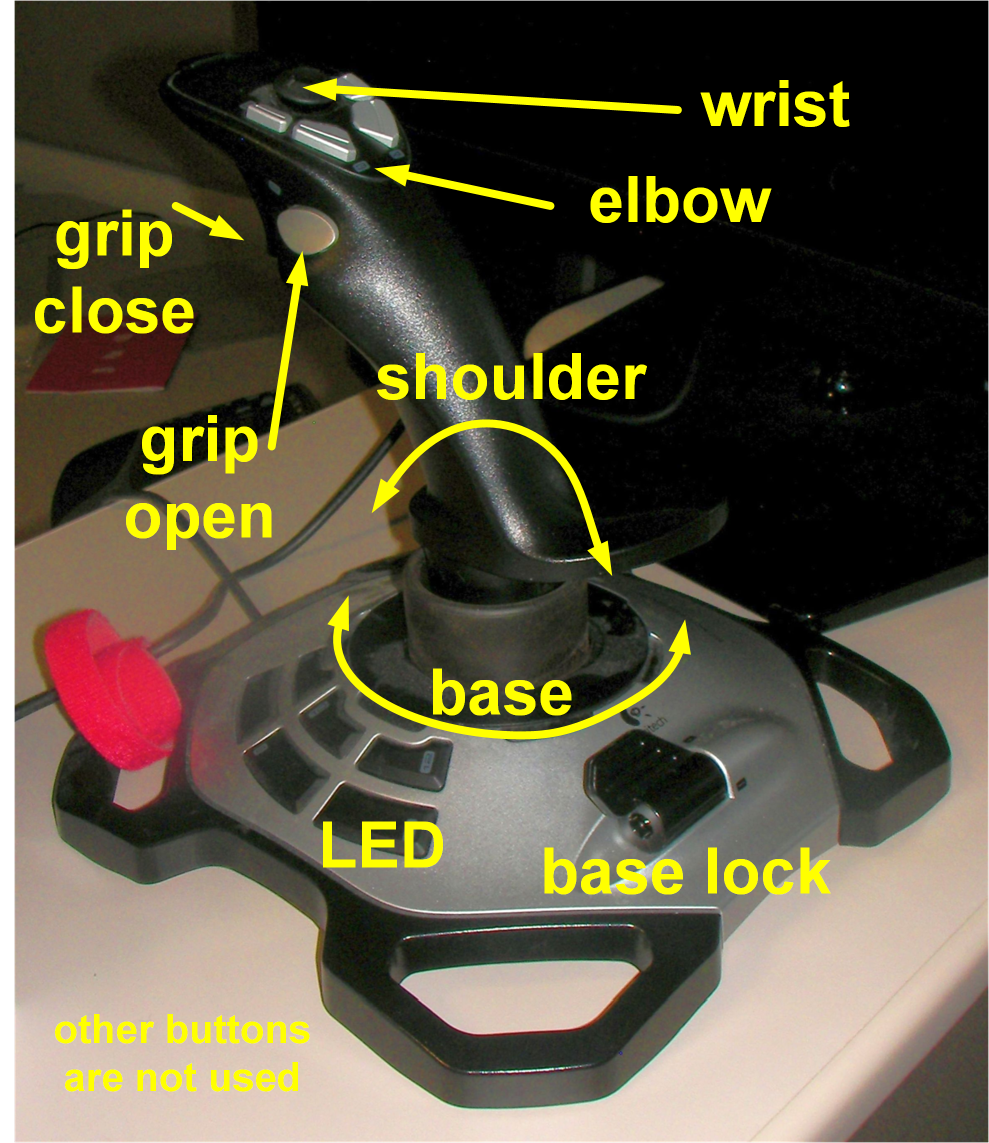
This is the joystick we will use. (model: Logitech Extreme 3D Pro) It is right-handed and has a twist action (vertical axis). We’ll use that for the base rotation.
| button | action |
|---|---|
| trigger | close grip |
| thumb | open grip |
| twist | rotate base in same direction |
| lever | turns on/off base rotation (useful when trying to grasp objects) |
| joystick | shoulder axis: forward=down, back=up |
| elbow | two buttons, forward and back |
| wrist | knob, forward=down, back=up |
The joystick buttons are described in file:
edgeRoboArmIOC/support/usb-1-0/usbApp/Db/LogitechExtreme3DPro.in
The actions are mapped to buttons in a database file:
edgeRoboArmIOC/support/xxx-5-6/xxxApp/Db/roboArm.db- (includes all of
edgeRoboArmIOC/support/ip-2-13/ipApp/Db/roboArm.db)
EPICS IOC startup commands to support the joystick.
1 2 3 | usbCreateDriver("JOYSTICK", "$(USB)/usbApp/Db/LogitechExtreme3DPro.in")
usbConnectDevice("JOYSTICK", 0, 0x046D, 0xC215)
dbLoadRecords("../../xxxApp/Db/roboArm.db", "P=xxx:, A=A1:, INPORT=JOYSTICK, OUTPORT=USB1")
|
The database provides the mapping between EPICS records and joystick buttons.
The joystick grip buttons are mapped in a calcout record.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | record(calcout, "$(P)$(A)grip_calc")
{
field(INPA, "$(P)$(A)Trigger_State.VAL NPP")
field(INPB, "$(P)$(A)LButton_State.VAL NPP")
field(CALC, "2 * B + A")
field(OUT, "$(P)$(A)grip_move PP")
}
record(bi, "$(P)$(A)Trigger_State")
{
field(DTYP, "asynInt32")
field(SCAN, "I/O Intr")
field(INP, "@asyn($(INPORT), 0, 0)TRIGGER_PRESSED")
field(FLNK, "$(P)$(A)grip_calc")
}
record(bi, "$(P)$(A)LButton_State")
{
field(DTYP, "asynInt32")
field(SCAN, "I/O Intr")
field(INP, "@asyn($(INPORT), 0, 0)LBUTTON_PRESSED")
field(FLNK, "$(P)$(A)grip_calc")
}
|
Note
To use a different joystick, you’ll need to create
a new file todescribe the buttons on the joystick and the values
used by USB communications: $(USB)/usbApp/Db/<new_joystick>.in
Then, you’ll need to modify the ../../xxxApp/Db/roboArm.db file
for the names of the new buttons. You might also need to update the
calculation logic in the database to match your new joystick.