2016 ANL Open House¶
On 2016-05-21, Argonne National Laboratory [1] hosted an open house. [2] The EPICS Edge Robot Arm was presented as a control system demonstration.
Connecting it all up¶
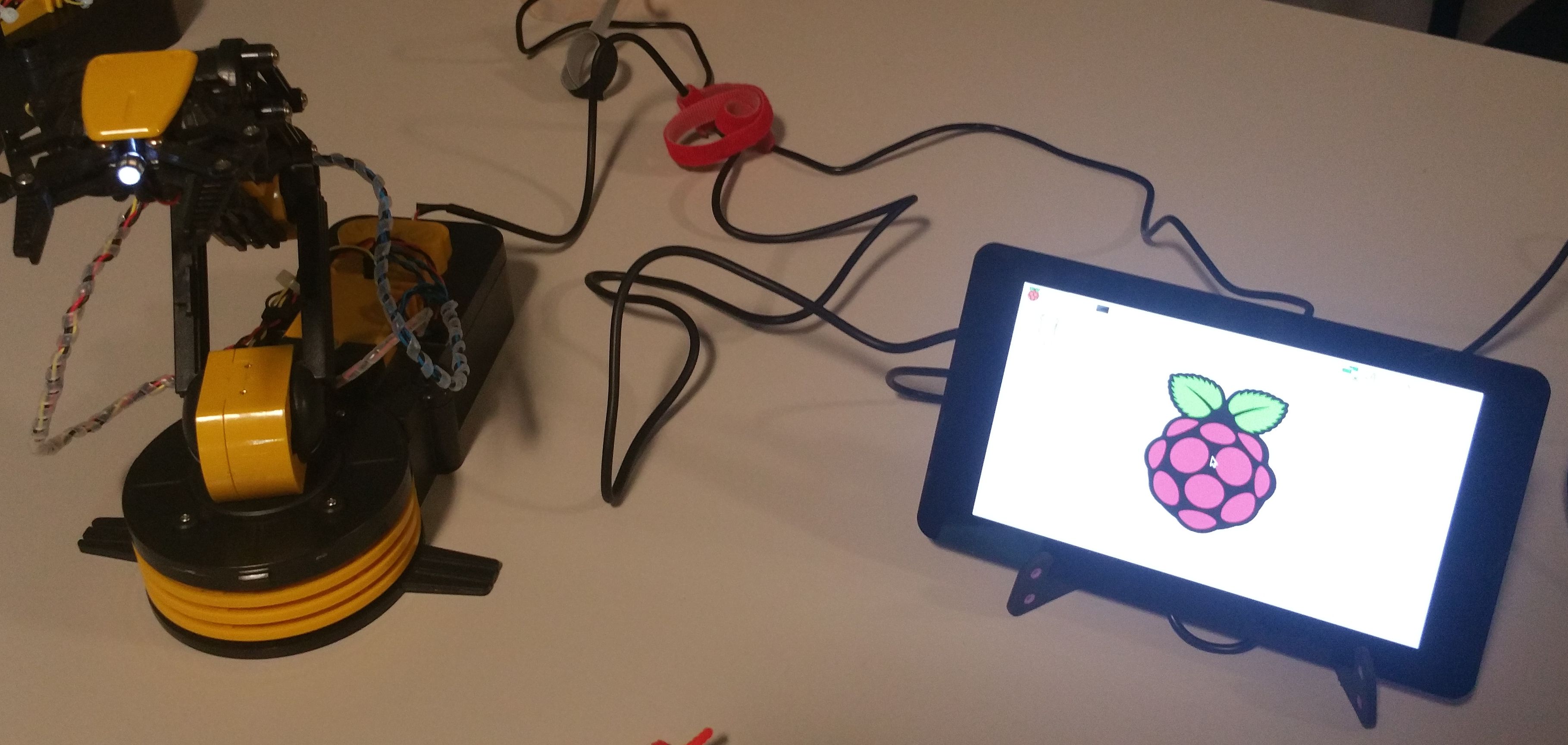
- unplug the 5V transformer from 120 VAC power
- plug the 5V transformer micro USB cable into the lower board (the touch screen board), that board will supply power to the RasPi
- plug the RoboArm USB cable into the RasPi
- plug the joystick/controller USB cable into the RasPi

RasPi, joystick, and RoboArm connected
Power On¶
The power transformer is plugged in to the outlet strip to power up the RasPi.
The RoboArm USB interface has a power switch on the top of the battery box. Turn it on while the RasPi is starting.

RasPi starting up after power is applied.
Once the RasPi starts, the IOC should start within a minute (or two). The RoboArm LED (behind the grip) will turn on at the end of the IOC startup file, signalling the IOC has started.
The RoboArm LED is ON indicating the EPICS IOC has started.
If plugged in, the joystick should be able to operate. Test the LED to verify.
Start the GUI (manually)¶
On first logging in after startup, the GUI is supposed to start automatically, about a minute after the IOC starts. This is not working now.
Follow these steps to start the GUI from the touch screen.

Step 1. start the File Manager on the touch screen
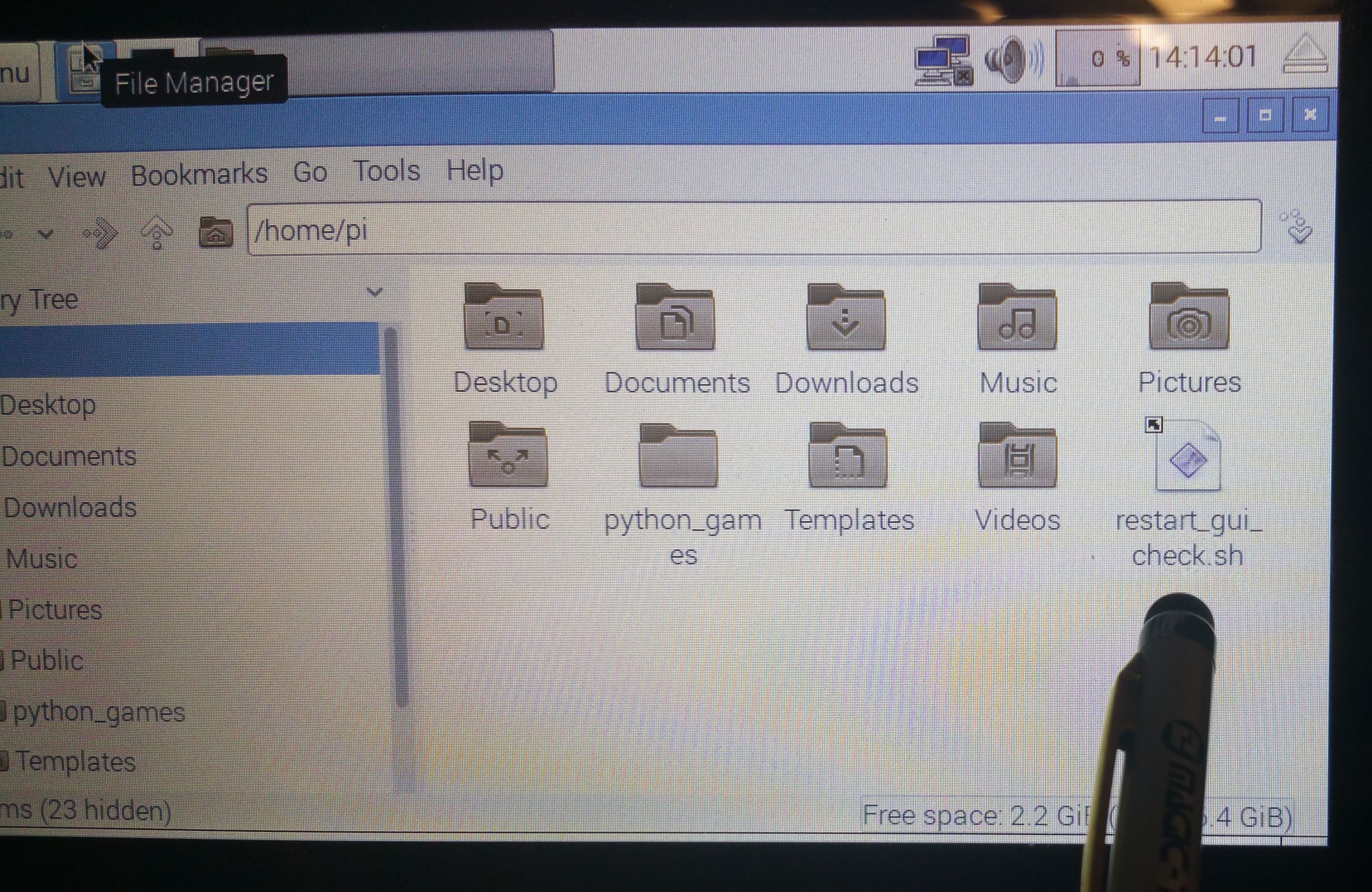
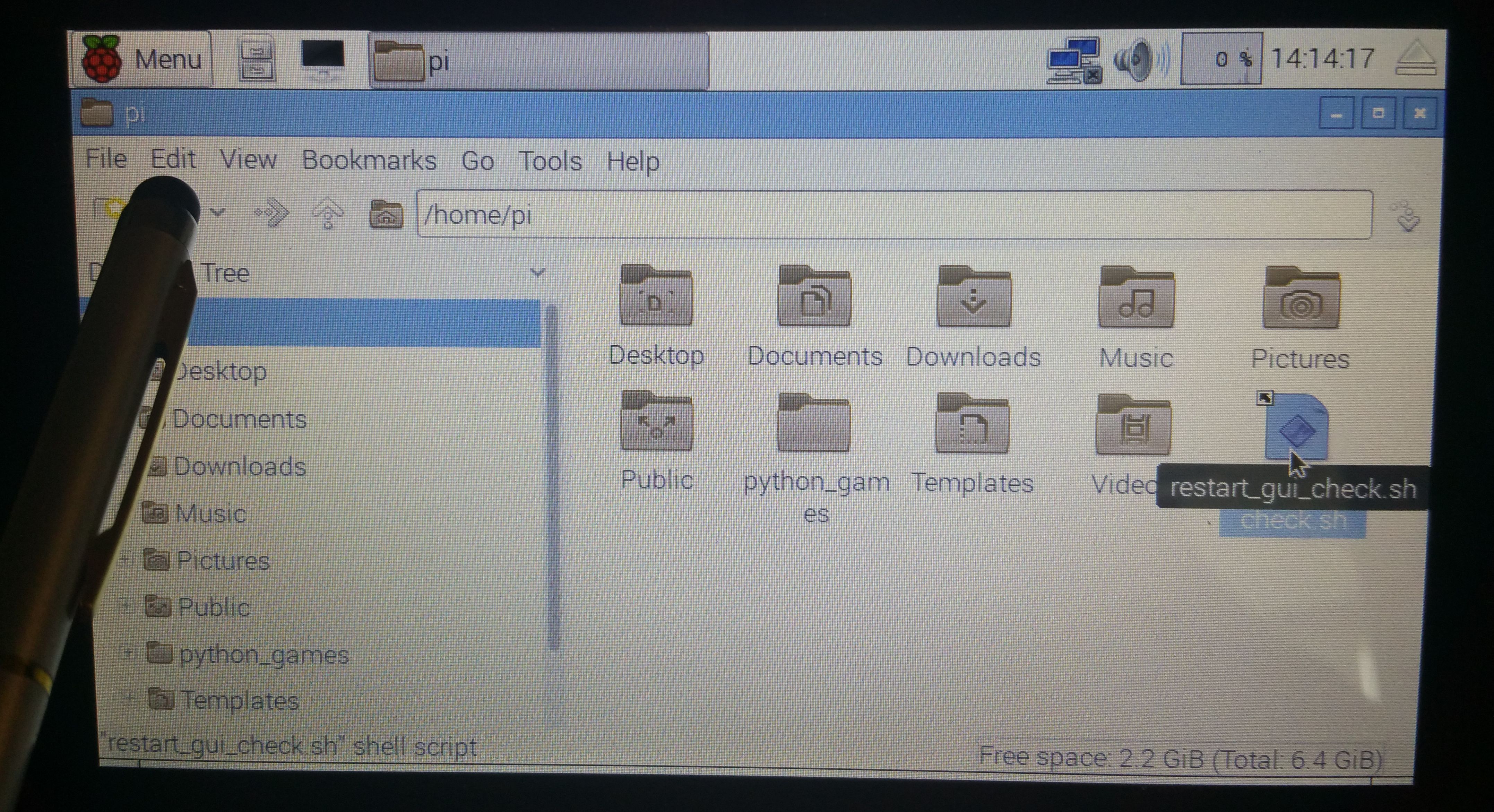
Step 2. touch restart_gui_check.sh
Step 3. touch Edit menu
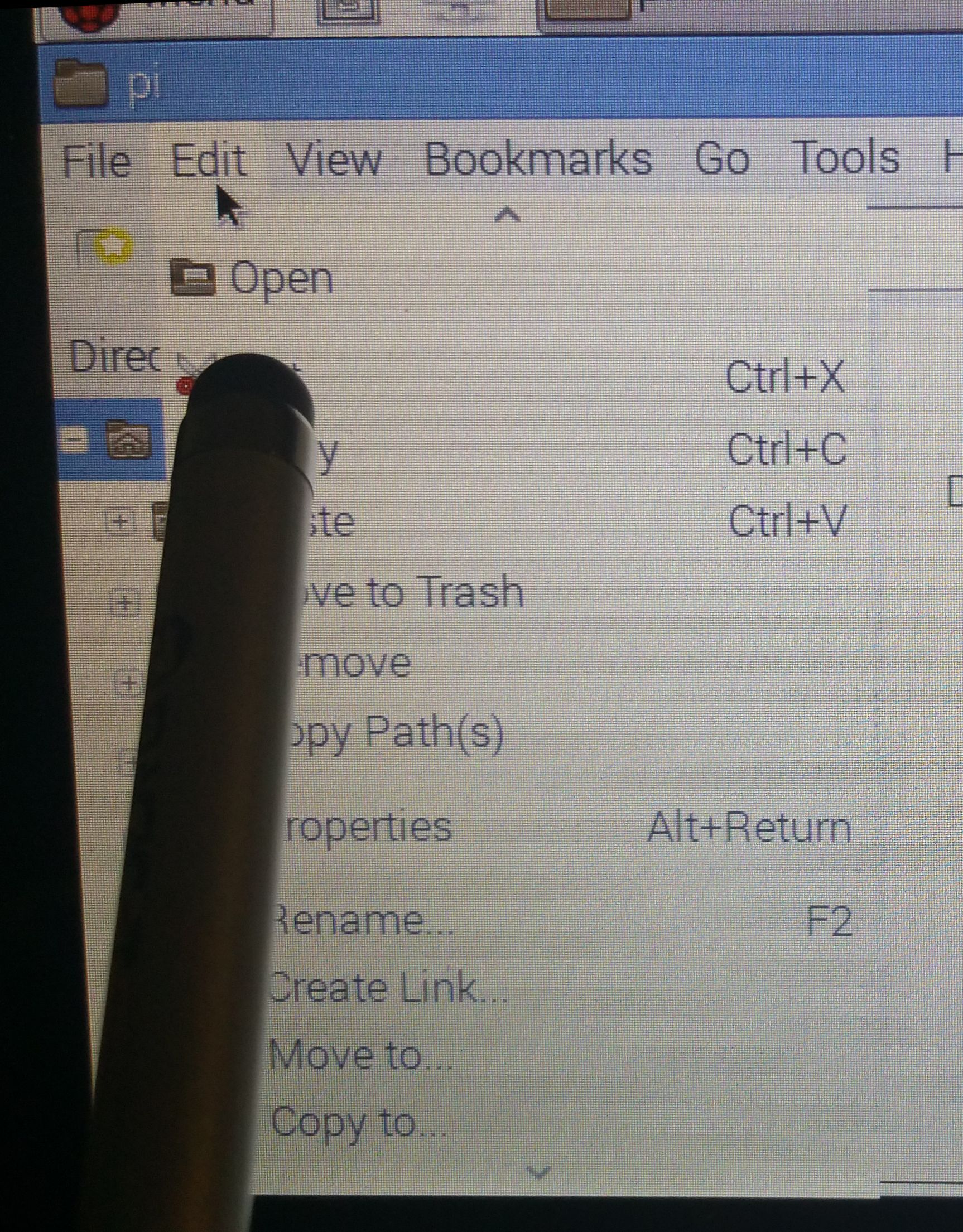
Step 4. touch Open item
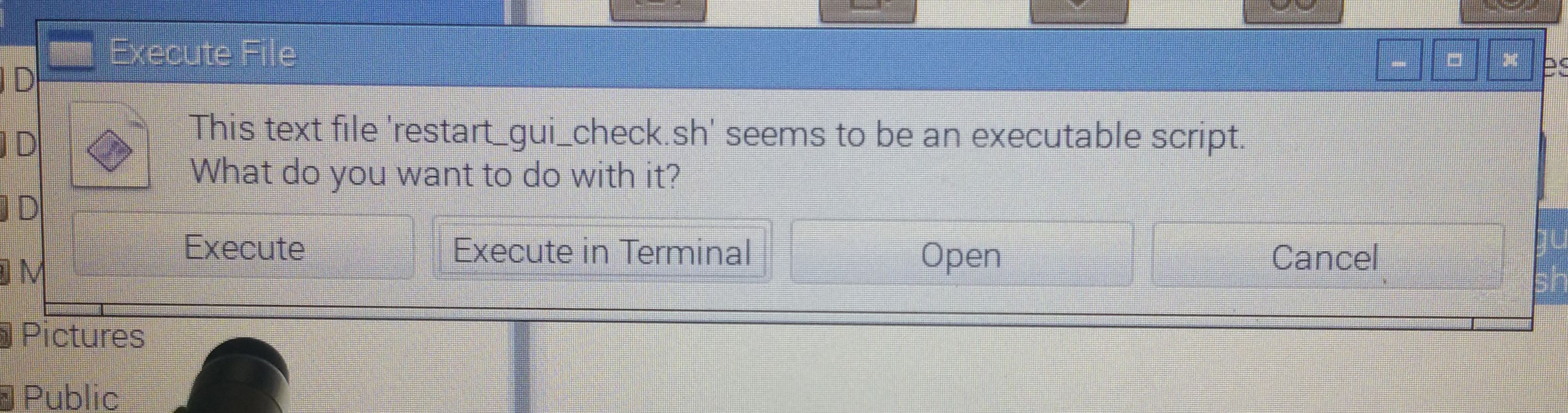
Step 5. press Execute button
Python Touch Screen GUI¶
While the touch screen is multi-touch (the screen can indicate more than one touch at a time), the Python GUI is not prepared to handle more than one button press at a time.
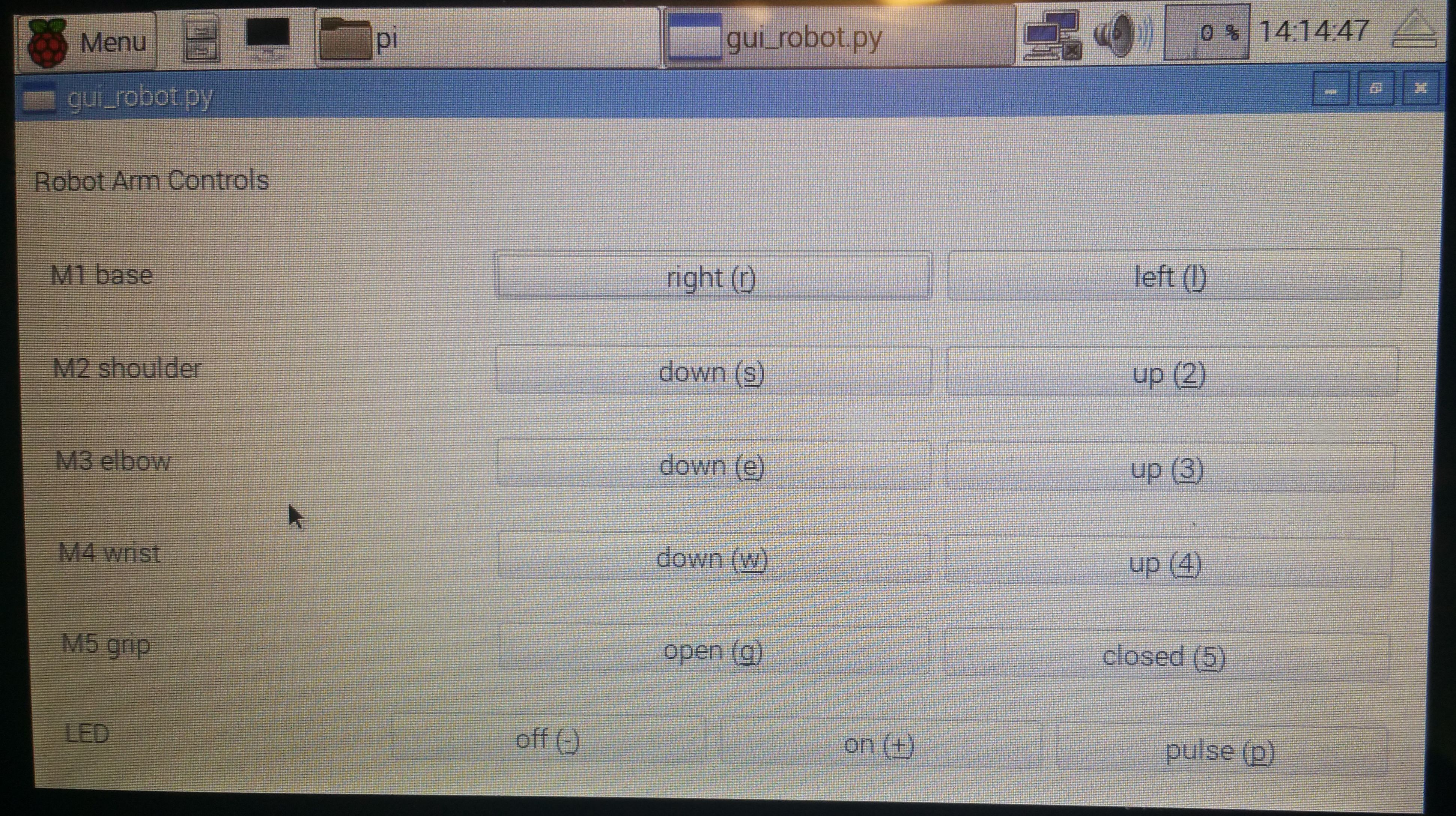
Python Touch Screen GUI
Joystick Controls¶
The Robot Arm can be moved using a joystick or game controller plugged in to a USB port on the IOC. An EPICS substitutions file should be prepared for each new type of joystick, to map the buttons to the EPICS database actions.
The IOC is prepared for the joystick to be hot-swapped (unplugged, changed to a different one, ....
If you plug in a second recognized joystick, it will also work. If it is the same type as an existing plugged-in joystick, the second will be ignored unless you create additional EPICS support. But, who would ever do that?
IOC Preparation¶
A Raspberry Pi 3 (RasPi3) was setup with linux raspbian jessie operating system on a 16 GB micro SD card (an 8GB card would be fine just as well). Once the system was setup and operations verified, the SD card was imaged for use on several systems. The units chosen for the demo were Raspberry Pi 2 (which can run the same software and architecture build).
For the open house demo system, a 7” touch screen was configured so that the computer will run without keyboard or mouse.
EPICS base release 3.14.12.5 [3]
was installed (and built) in /usr/local/epics/base.
The EPICS Edge Robot Arm project software [4]
was installed using a git clone command in the
/usr/local/epics` directory. To facilitate
configuration already in the project, a soft link
was made as follows:
cd /usr/local/epics
ln -s epicsEdgeRoboArm/edgeRoboArmIOC ./edgeRoboArmIOC
cd edgeRoboArmIOC/support
make release
make
Various packages were installed
(using sudo apt-get install <package>)
so that the build was successful.
Among these:
|
|
|
The IOC must be run by the root user to communicate through the USB port. The Python GUI can be run by the pi user (it communicates with the EPICS IOC using EPICS Channel Access protocol). Both of these are started by cron tasks. Each cron task checks every minute to see if its assigned process is not already running and that appropriate resources are available:
- IOC: the USB from the robot is plugged in and the robot arm is powered on
- GUI: the IOC is started
note: The GUI task is not starting from its cron task. The startup script must be run manually (see Start the GUI (manually)).
Footnotes
| [1] | http://www.anl.gov |
| [2] | http://www.anl.gov/events/argonne-open-house |
| [3] | http://www.aps.anl.gov/epics/base/R3-14/12.php |
| [4] | https://github.com/BCDA-APS/epicsEdgeRoboArm |