Get the ball rolling: The Marble Tree¶
The robot arm can lift small objects and move them under visual control. Using a joystick and some practice, the control can become intuitive.
A great example of the robot would be to place a ball in a maze, pick it up at the end and repeat. With that in mind, a marble tree (wooden musical instrument and coffee table amusement) is ideal. The marble tree shown in the pictures was purchased in Berea, KY. [1]
Example¶
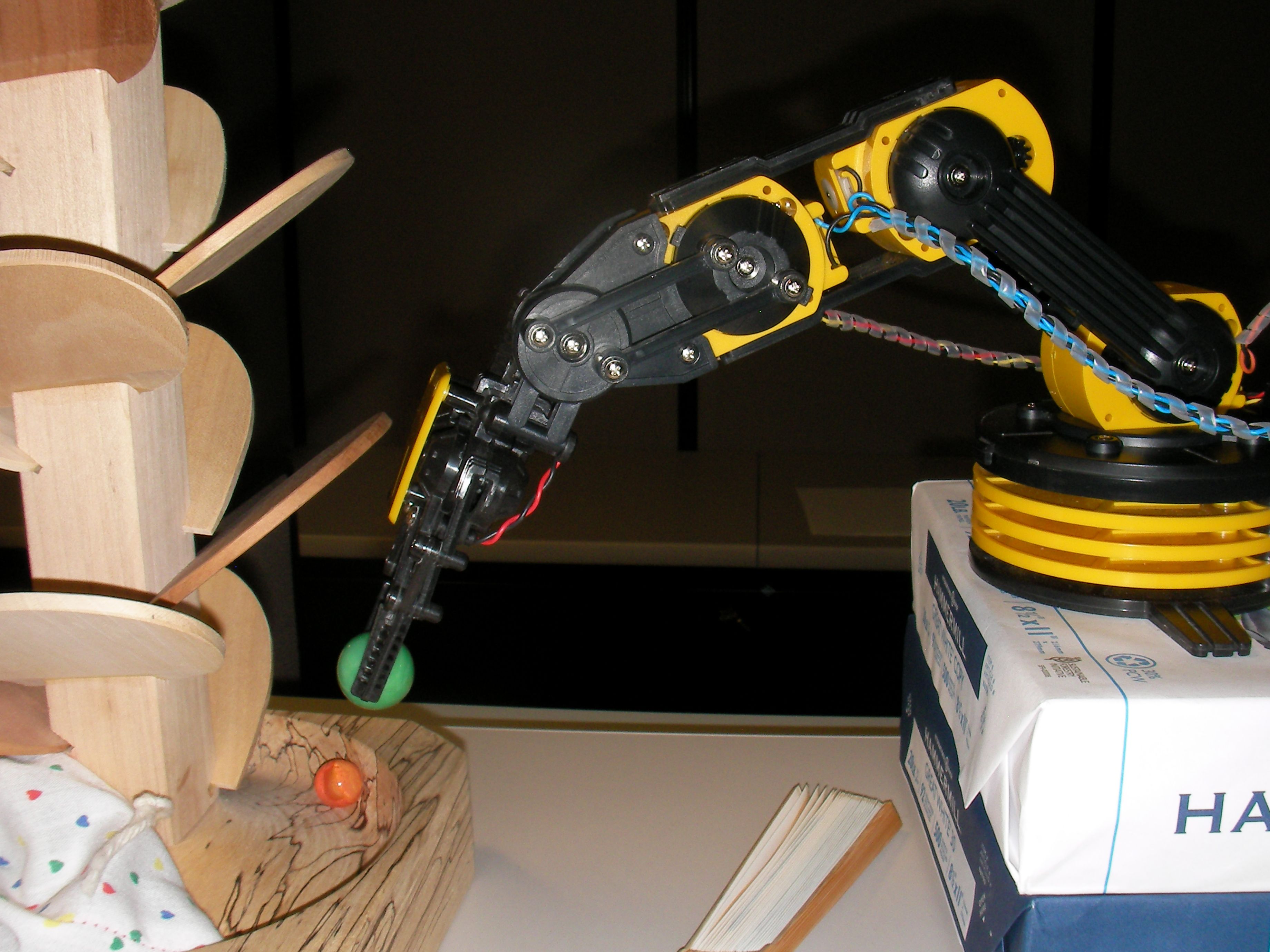
This system uses the robot arm, a Raspberry Pi to run the IOC, and a joystick that runs in the IOC. No GUI is necessary. It is useful to place the robot on a plinth so that it can reach top of the marble tree, as well as pick up the marble from the bin at the bottom.

System for marble tree example
See the section Joystick - IOC support (not really a client) for details about the mapping of controls on the joystick.
Once the Raspberry Pi has been connected to the joystick and robot arm and the Linux system is started up, the EPICS IOC should start within two minutes. (Otherwise something is wrong. Check all the connections.) Keep in mind that the Raspberry Pi is very sensitive to changes in electrical power demand. It is best to plug everything in before plugging in the electrical power to the Raspberry Pi.
Pulse the LED button to ensure the IOC is operating.
Step 1¶

Move arm into place to pick up marble. Be sure to clear all the wooden leaves!

Address the ball. [2]
Step 2¶

Approach the ball with the grips open. It may help to turn on the LED to verify alignment.
It may be needed to nudge the ball to using the base to pick it up with the grips.
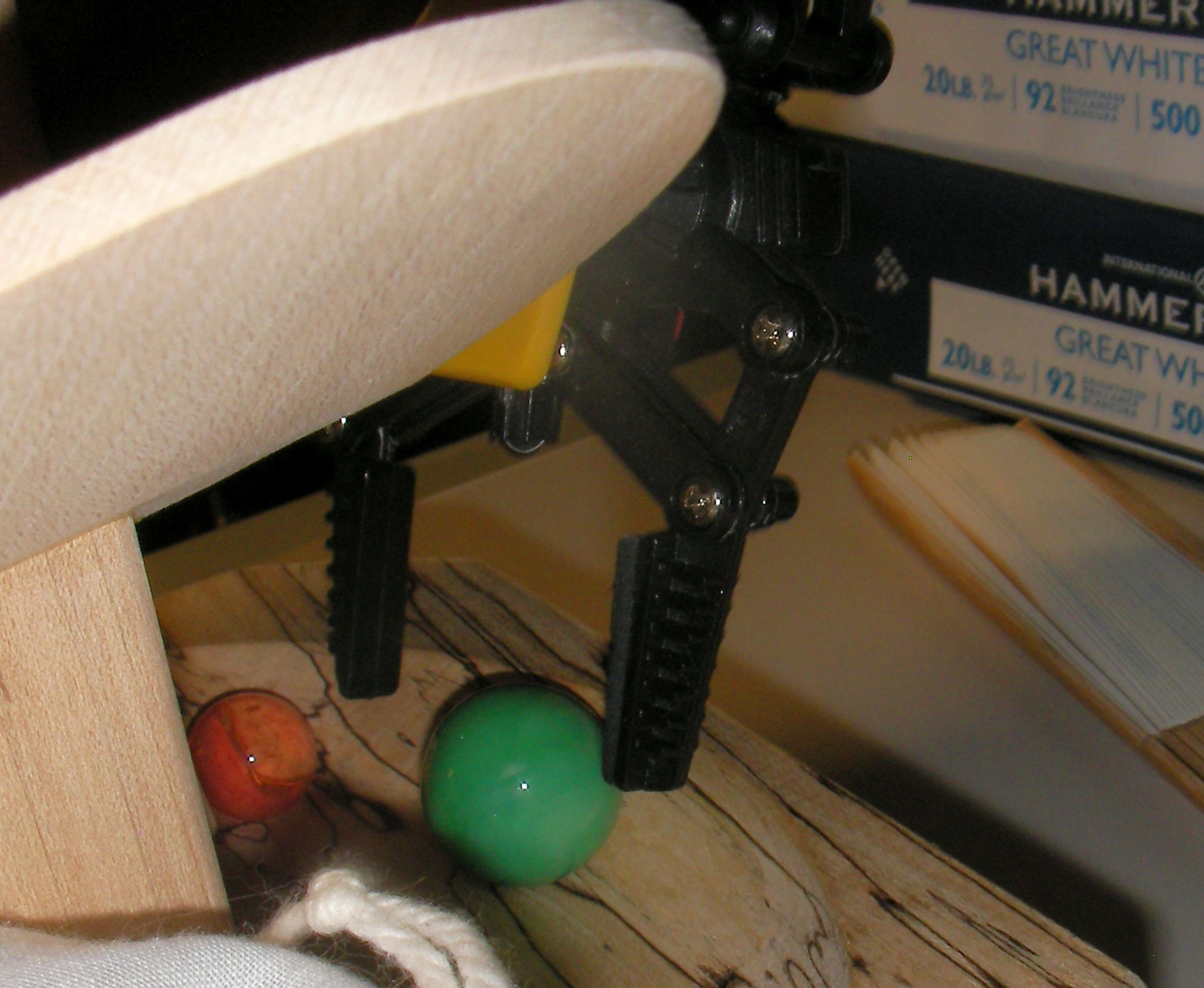
Step 3¶

Grip the ball until the motor stops.
Step 4¶
Carefully, raise the shoulder a bit, without banging the wooden leaves. Don’t knock the ball out of the grips.
Step 5¶
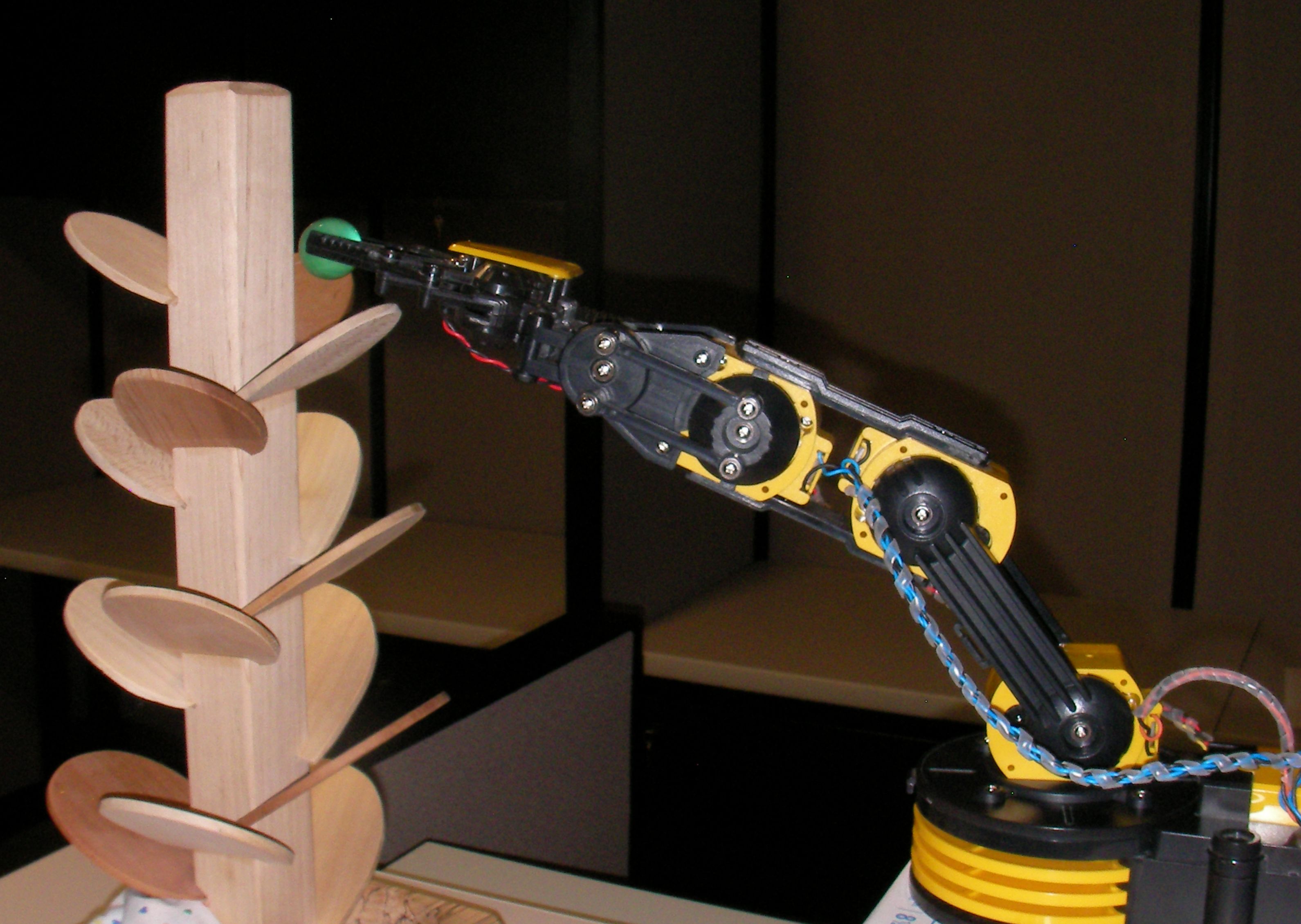
Raise and lengthen the arm to position the ball at the top of the marble tree.
Step 6¶

Open the grips to release the ball. Listen as the ball moves downward.
| [1] | marble tree: http://www.berea.com/appalachian-fireside-gallery/ |
| [2] | http://www.barryrhodes.com/2012/01/addressing-ball.html |